Predicting ego-vehicle paths from environmental observations with a deep neural network
Ulrich Baumann, Claudius Gläser, Michael Herman, J. Marius Zöllner
IEEE International Conference on Robotics and Automation, 2018, Brisbane, Australia, May 21 – 25, 2018
Abstract:
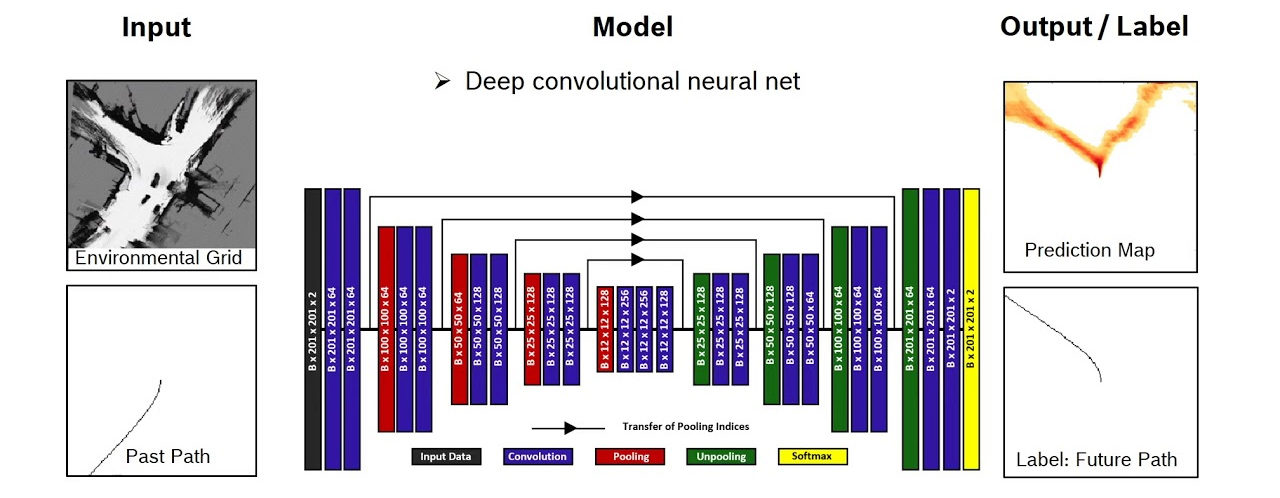
Advanced driver assistance systems allow for increasing user comfort and safety by sensing the environment and anticipating upcoming hazards. Often, this requires to accurately predict how situations will change. Recent approaches make simplifying assumptions on the predictive model of the Ego-Vehicle motion or assume prior knowledge, such as road topologies, to be available. However, in many urban areas this assumption is not satisfied. Furthermore, temporary changes (e.g. construction areas, vehicles parked on the street) are not considered by such models. Since many cars observe the environment with several different sensors, predictive models can benefit from them by considering environmental properties. In this work, we present an approach for an Ego-Vehicle path prediction from such sensor measurements of the static vehicle environment. Besides proposing a learned model for predicting the driver’s multi-modal future path as a grid-based prediction, we derive an approach for extracting paths from it. In driver assistance systems both can be used to solve varying assistance tasks. The proposed approach is evaluated on real driving data and outperforms several baseline approaches.
@INPROCEEDINGS{Baumann2018ICRA,
author={U. {Baumann} and C. {Gläser} and M. {Herman} and J. M. {Zöllner}},
booktitle={2018 IEEE International Conference on Robotics and Automation (ICRA)},
title={Predicting ego-vehicle paths from environmental observations with a deep neural network},
year={2018},
month={May},
}