ICCV’21: 2nd Workshop on Benchmarking Trajectory… 17. October 2021 • Talk Accurately predicting human motion is a challenging task for assisted or automated vehicles, as humans have latent goals, independent movement styles, are stochastic, […]
Pedestrian Behavior Prediction for Automated Driving:… 15. January 2021 • Publications Pedestrian Behavior Prediction for Automated Driving: Requirements, Metrics, and Relevant Features Michael Herman, Jörg Wagner, Vishnu Prabhakaran, Nicolas Möser, Hanna Ziesche, Waleed Ahmed, […]
Classifying Road Intersections Using Transfer-Learning on… 23. November 2018 • Publications Classifying Road Intersections Using Transfer-Learning on a Deep Neural Network Ulrich Baumann, Yuan-Yao Huang, Claudius Gläser, Michael Herman, Holger Banzhaf, J. Marius Zöllner […]
Functionally Modular and Interpretable Temporal Filtering… 17. November 2018 • Publications Functionally Modular and Interpretable Temporal Filtering for Robust Segmentation Jörg Wagner, Volker Fischer, Michael Herman, Sven Behnke 29th British Machine Vision Conference, 2018, […]
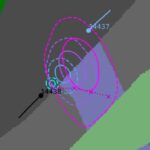
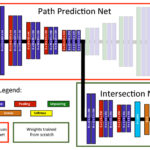
Predicting ego-vehicle paths from environmental observations… 1. June 2018 • Publications Predicting ego-vehicle paths from environmental observations with a deep neural network Ulrich Baumann, Claudius Gläser, Michael Herman, J. Marius Zöllner IEEE International Conference […]